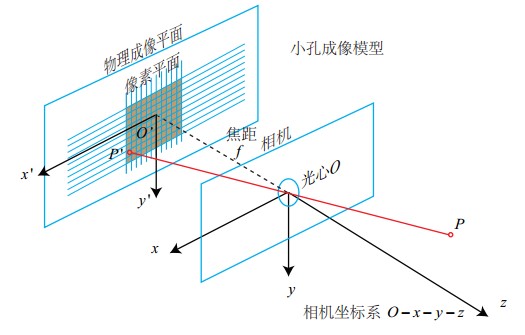
三种成像相关坐标系
- 像素坐标系:一种 2D 坐标,以图片左上角为原点,横轴(宽度方向)向右为
x轴正方向,纵轴(高度方向)向下为y轴正方向,单位是像素 - 相机坐标系:一种 3D 坐标,以相机光心为原点,垂直相机平面远离相机方向为
z轴正方向,垂直于z轴且平行于相机平面,水平向右为x轴正方向,竖直向下为y轴正方向,单位是米 - 世界坐标系:一种 3D 坐标,一种人为定义的,且
x,y,z轴两两垂直的坐标系,单位是米
相机内参
-
相机内参可以实现像素坐标系与相机坐标系之间相互转换,通常使用一个 3 * 3 矩阵表示
-
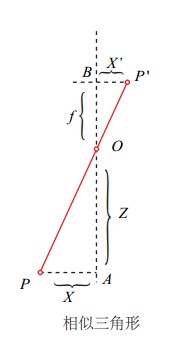
根据小孔成像和相似三角形原理,可以得出相机坐标系与成像坐标系点的对应关系:
其中: 为相机坐标系下的点的坐标, 为投影到成像平面上的点的坐标, 表示焦距。 -
再根据成像坐标系到像素坐标系的对应关系:
其中:
- 分别表示 方向上成像宽度到像素宽度的投影
- 由于成像坐标系原点为成像中心,像素坐标系原点为像素左上角,所以需要加上原点的偏移, 分别表示 方向上原点的偏移。
-
所以,相机坐标系 与像素坐标系 可通过相机内参相互转换:
其中: 表示相机坐标系下的深度
-
被称为相机内参
相机外参
-
相机外参可以实现相机坐标系与世界坐标系之间相互转换(刚体变换),通常用一个 3 * 3 的旋转矩阵 和一个 3 * 1 的平移矩阵 表示:
其中: 表示相机坐标系下的点, 表示世界坐标系下的点
-
齐次化之后,得到一个
4 * 4的矩阵: